TRR multiped category
This is the second robot I presented to the fisrt edition of the Toulouse Robot Race competition. The objective was to go straight to the finishng line in a minimum amount of time to the finishng line.
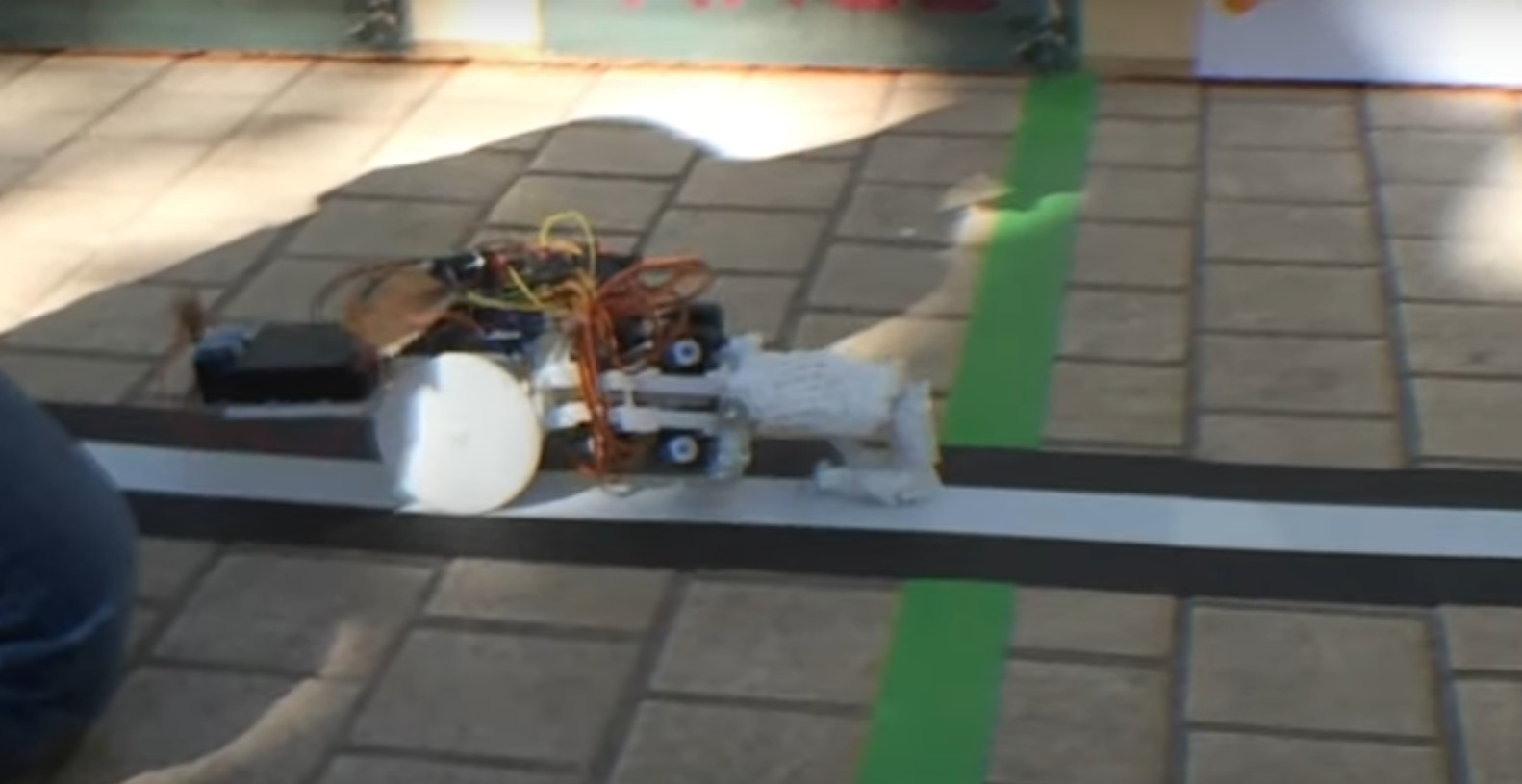
Click on the image to launch the video (/images/hand1.jpg)
This project is based on an previous one, composed of one robotic hand on which I mounted a pair of wheels and an embeded battery. The hand was openinng and closing alternatively to perform a forward motion by grasping the asperities of the ground. Unfortunately the cobblstones created more resistance when the wheels were in the groove than the finger tips could grab… The tape put on the track reduces to zero the grip the figer tips. Nevertheless the jry congratulated me with the a special prize for the most unlikely robot the competition nested 😄
Some elements were necessary :
- 8 servos controlled by an arduino
- The structure supporting the servos is built with custom 3D prints
- The batttery pack is made wth a commercial casing